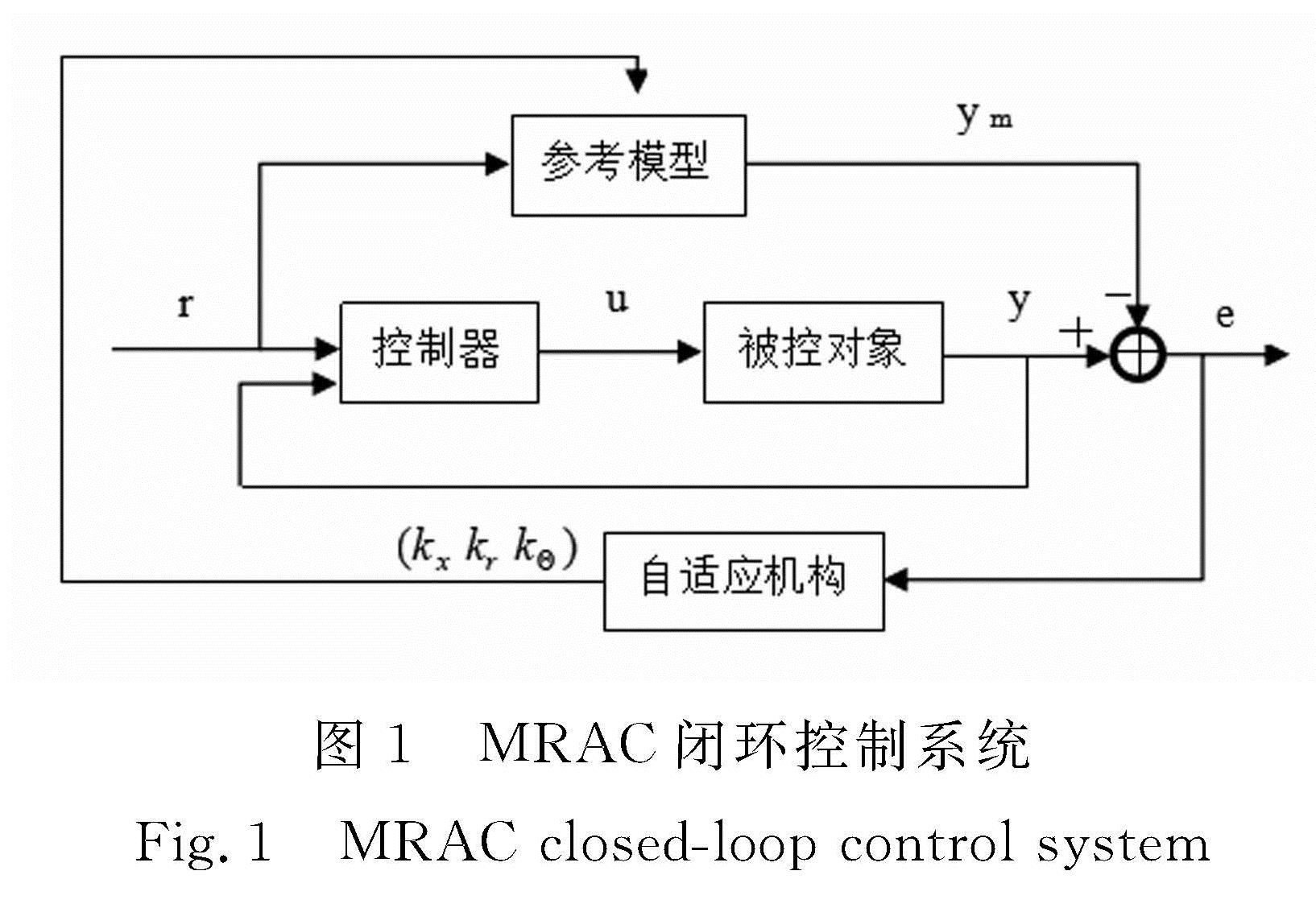
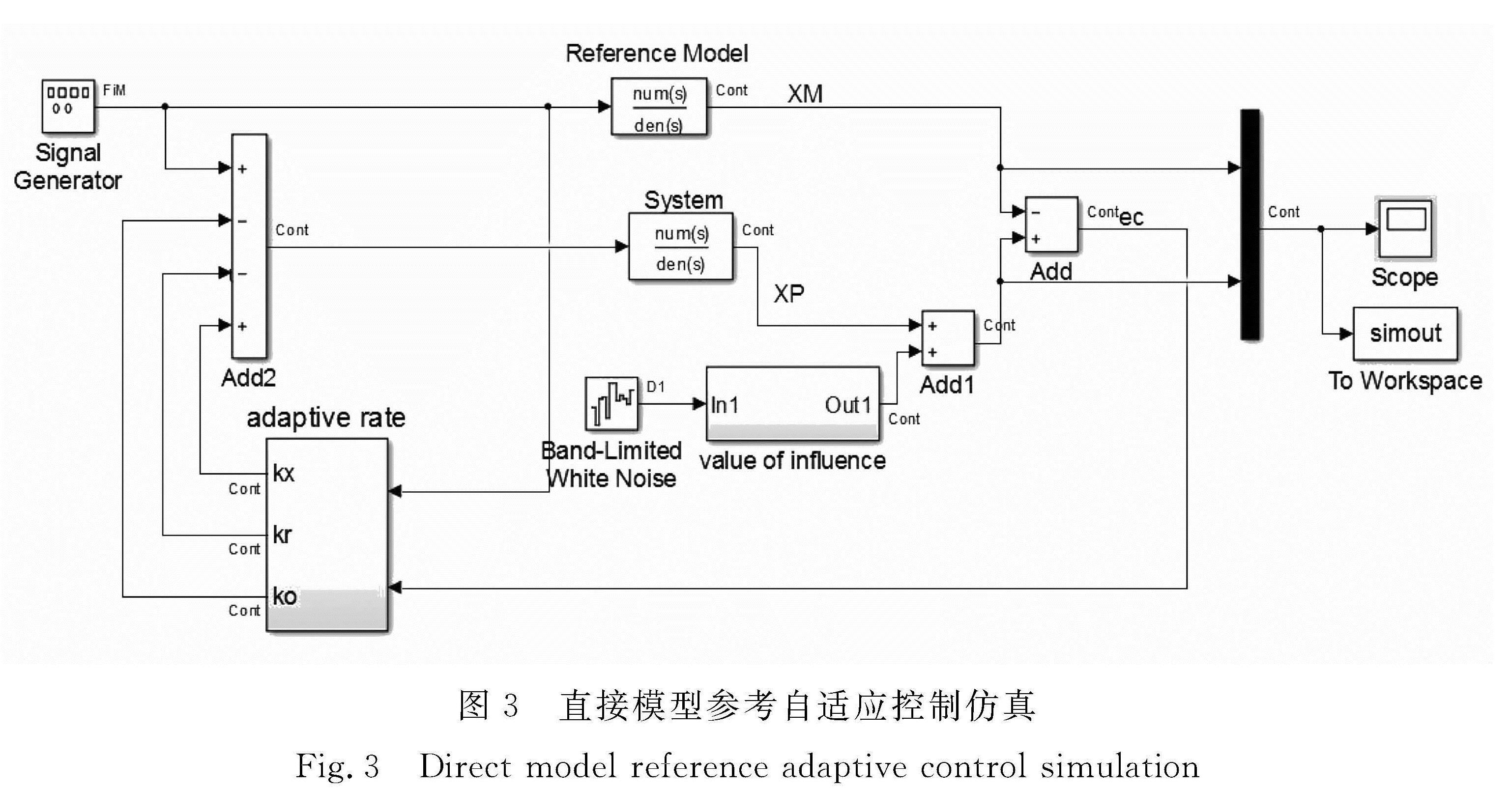
依据系统参数,在Matlab中构建仿真模型,如图3所示.
图3 直接模型参考自适应控制仿真
Fig.3 Direct model reference adaptive control simulation
图3为直接MRAC控制器在Matlab中的实现过程.为了更好地观察图形的跟随性,利用系统输入一个为r的持续信号发生器,使飞行器具有一个连续稳定的输入; 控制器误差为ec,采用自适应律对控制器进行调整,其中自适应率的设计根据式(19)设计完成; 控制误差是系统输出xp与参考模型xm输出的差值; 自适应控制系统的滚转方向参考模型是利用系统辨识试验的方法得到的; 控制系统模型是通过理论的方法得到的.在控制过程中,使系统的输出尽可能接近最优的性能指标.在利用Lyapnov函数分析的基础上,推导了自适应率,保证了闭环系统的稳定性.在设计控制器的过程中,为了便于控制器的设计实现,将其控制系统的非线性影响因素假设为白噪音.
在最大可能减少影响因素的情况下,本文利用系统辨识试验的方法得到了自适应控制系统的滚转方向参考模型.通过将采集到的实时飞行信息进行多次辨识以期达到理想的结果.因四旋翼飞行器在飞行过程中外部的影响因素多是一个非线性的运动,为了便于对其分析,假设其在悬停的状态下是一个三轴角速度输入三轴角度输出的SISO化系统,则四旋翼飞行器辨识系统的通道模型可用一个二阶系统来表示:G(s)=(k1s+k2)/(s2+k1s+k2)(23)在四旋翼飞行器辨识过程中,应用最小二乘法,辨识环境为将一轻质不锈钢管穿过四旋翼机架的中心位置,并将其两端穿入固定轴承内,使其只在滚转方向运动.其中激励信号采用M序列,采集系统是在Labview中进行模块化编写,涉及辨识频率的选择,不确定数据的处理等,因其不是本文研究重点,在此不作过多分析.辨识过程中需要选用一种理想的,比较贴近实际的模型.结合四旋翼飞行器的飞行特性,本辨识中在Matlab中选用的是ARX220模型,模型系统的公式如下:A(z-1)y(k)=B(z-1)u(k-nk)+ξ(k)(24)式中:ξ(k)为系统误差; nk为系统的延时,本设计中系统的延时设为0.
根据实际实验数据分析辨识出的参数,则可得如下公式:A(z-1)=1-0.445 5z-1+0.644 3z-2(25)
B(z-1)=-5.508+5.303z-1(26)根据上述辨识结果,则辨识通道的离散传递函数为:G(z)=(-5.508z2+5.303z)/(z2-0.445 5z+0.644 3)(27)采用双线性变换[20],将上述传递函数线性化即Z变换到S变换,则参考模型为:G(s)=(-5.852s2-13.303s-0.995 4)/(s2+1.394 5s+3.025 4)(28)本仿真设计是在自适应控制率的调节作用下,使系统理论模型的输出沿着参考模型的轨迹输出来验证模型参考自适应控制的优良控制性能.
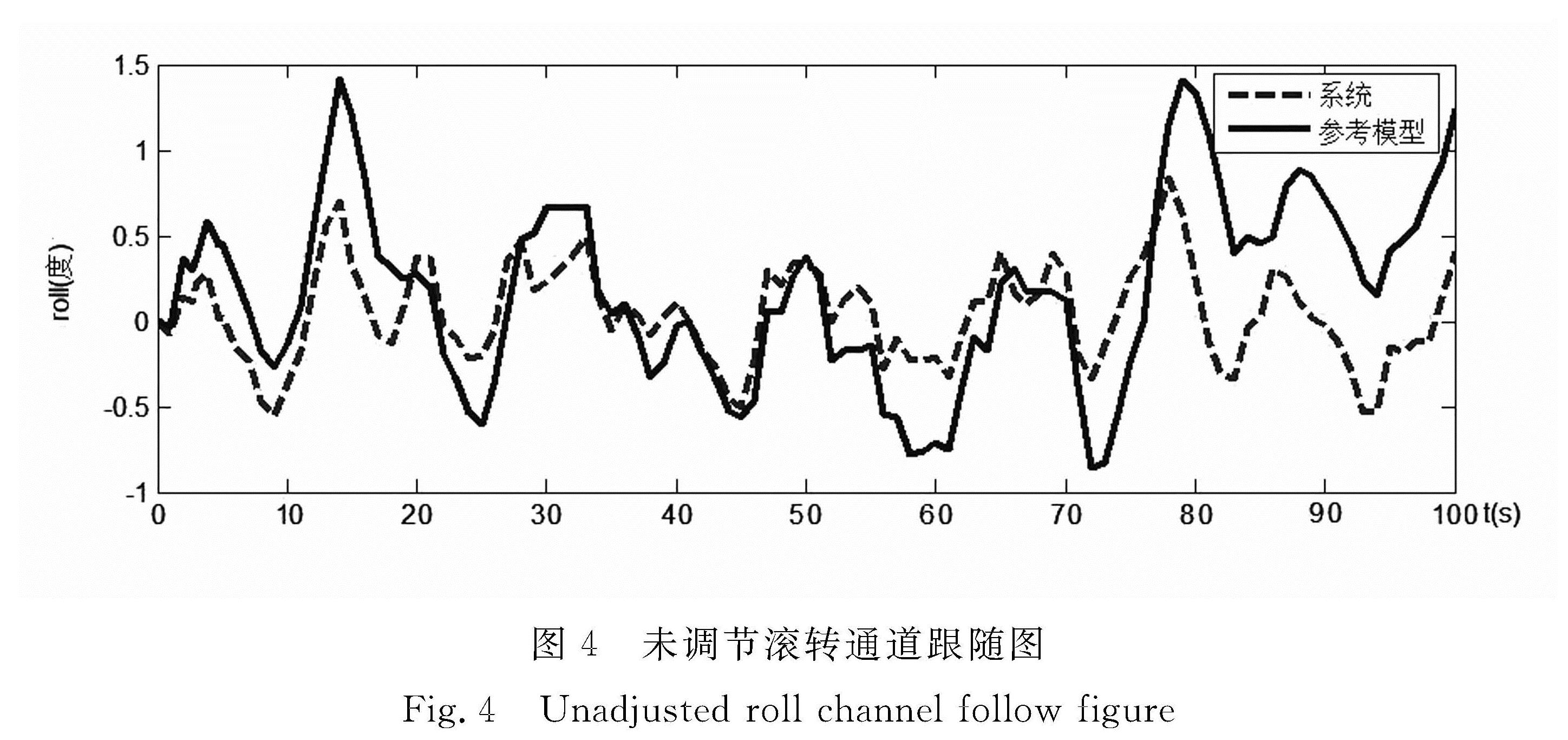
未经过自适应率调节参数的调节时,控制系统在M序列激励下,对参考模型滚转角的跟随性如图4所示.从图中可发现,系统的输出与预期的输出具有一定跟随行,虽滚转角的调节范围不到±1.5°,但波动明显较大,且调节不及时,甚至可能有现静态误差存在,跟随性较差,系统在跟随快速扰动时的稳定性、准确性和快速性均不理想.
图4 未调节滚转通道跟随图
Fig.4 Unadjusted roll channel follow figure
根据前文完成的控制器自适应率的设计,在Matlab中完成自适应控制器的程序编写,并进行调试.经过大量的调试实验后,选择最优自适应控制率如下:Γ
x=[20 0 0
0 20 0
0 0 20]; Γr=[50 0 0
0 50 0
0 0 50]; ΓΘ=[100 0 0
0 100 0
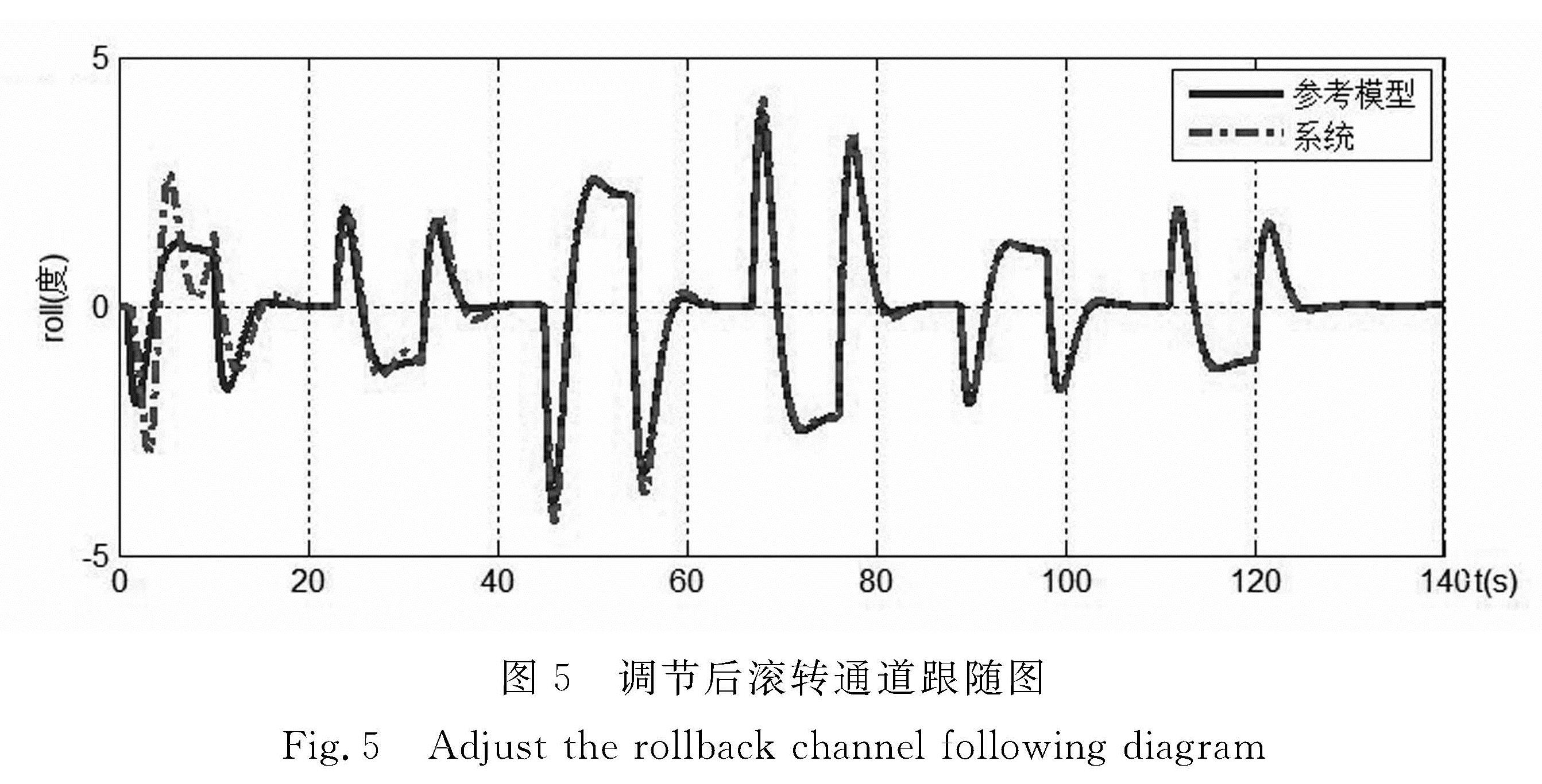
0 0 100](29)经过自适应率调节参数的调节后,控制系统在M序列激励下,模型参考自适应控制器对参考模型滚转角的跟随性如图5所示.
图5 调节后滚转通道跟随图
Fig.5 Adjust the rollback channel following diagram
对比图4和图5可知.经过自适应率调节参数后,即使在更大的滚转角调节范围内,控制器亦可使系统能够在短时间内(<20 s)达到指令值,实现输出实时跟随输入指令变化,且只有很小跟随误差,准确性高,系统对外部扰动(此处为白噪声)的抑制效果明显.当系统去掉输入信息,即指令值为0时(本次试验设定为>120 s时),系统亦能回复初始状态,输出稳定在0°附近,说明系统具有稳定性.